Robot Vision mit KI
Pharma
KI-Vision hilft Roboter beim Säcke-Handling
In einem international renommierten Unternehmen aus der Chemie- und Pharmaindustrie war die Zuführung von chemischen Stoffen zur Aufbereitung in der nachgeschalteten Anlage lange Zeit manuell organisiert: Mitarbeiter mussten bis zu 25 kg schwere Säcke von Paletten heben und die Inhalte für die weiteren Produktionsschritte vorbereiten. Aus ergonomischer, aber auch aus wirtschaftlicher Sicht war dieser Prozess keine gute Lösung.
Die Tatsache, dass der Inhalt der Säcke überwiegend als Gefahrgut eingestuft ist, führte zu der Entscheidung, diesen Anlagenteil so weit wie möglich zu automatisieren und die ASA Automation mit der Lösung zu beauftragen. Als Partner wurde die Vision On Line GmbH hinzugezogen, die sich auf bildverarbeitungsbasierte Automatisierungslösungen spezialisiert hat.
Siebte Achse für mehr Flexibilität
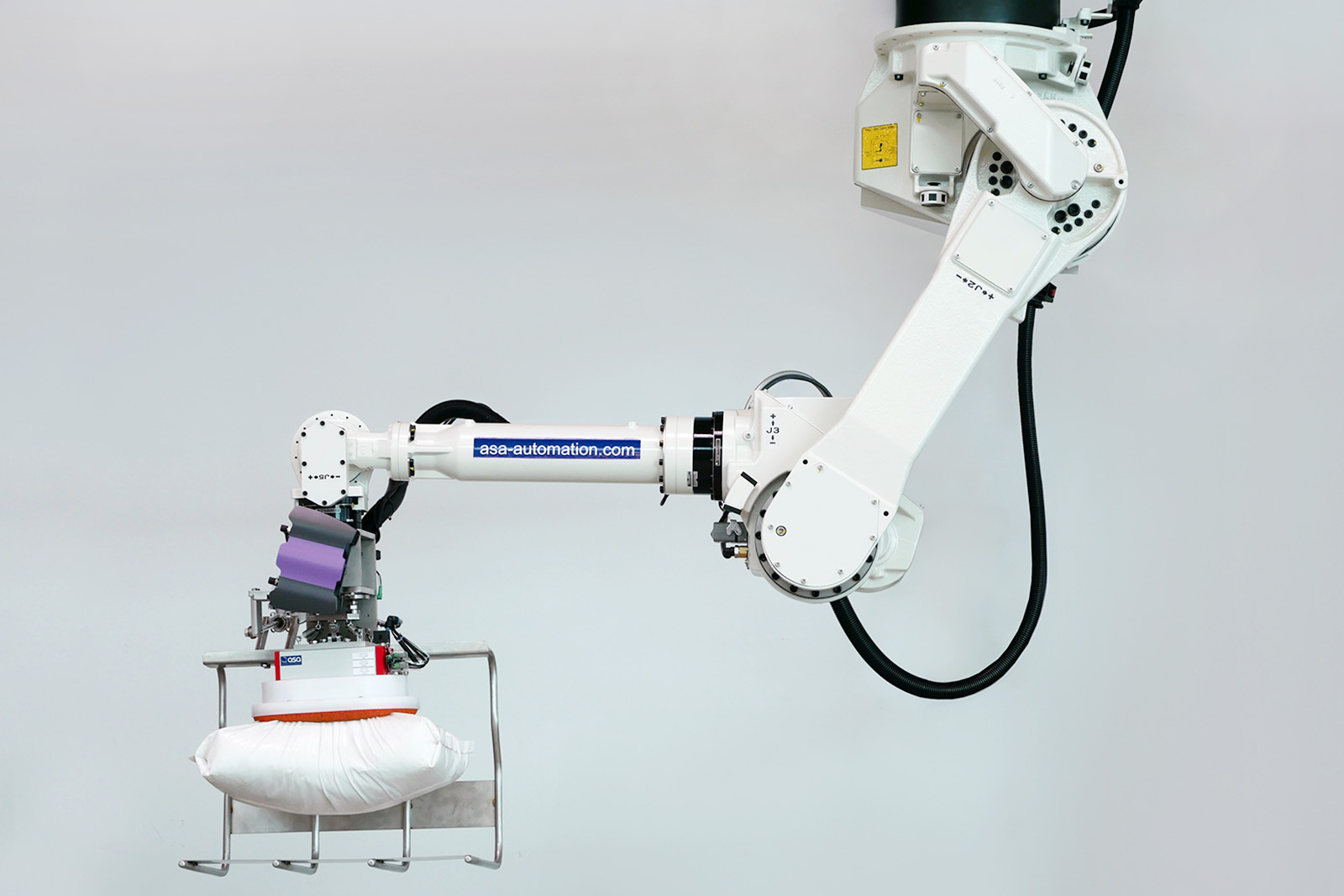
Den mechanischen Teil der Anlage wurde über einen Sechsachsroboter mit einer zusätzlichen siebten Achse für den Verfahrweg in X-Richtung realisiert. Durch dieses Setup ist sichergestellt, dass die über entsprechende Förderelemente auf einen definierten Stellplatz positionierten Paletten und die darauf liegende Sackware in Reichweite des speziell entwickelten Vakuum-Sauggreifers sind und der nachgeschalteten Anlage positionsgenau zugeführt werden kann.
Greifgenauigkeit ist entscheidend
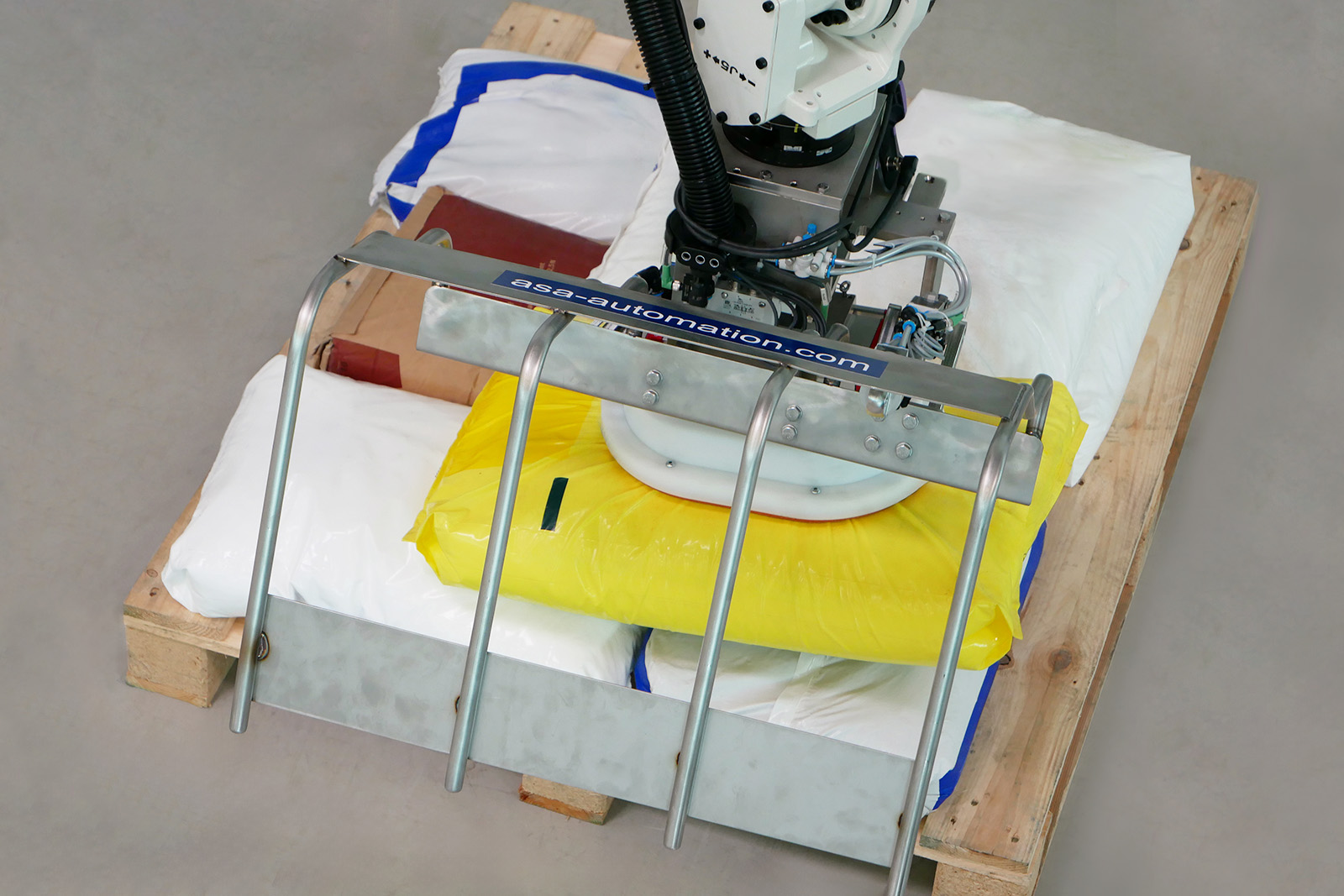
Das Aufnehmen der Säcke von der Bereitstellungsposition auf einer Palette wurde mit einem anwendungsspezifisch entwickelten Vakuum-Sauggreifer realisiert. Dieser verhindert das, je nach Inhalt und Beschaffenheit der Säcke, unterschiedlich starke Durchhängen und garantiert somit ein prozesssicheres Produkthandling. Auch musste auf eine hohe Genauigkeit bei der Ermittlung der exakten Greifpositionen gelegt werden, damit die Säcke, die nicht exakt im Mittelpunkt aufgenommen werden, beim Anheben oder während der nachfolgenden Bewegung nicht aufreißen können.
Bildvearbeitung mit KI
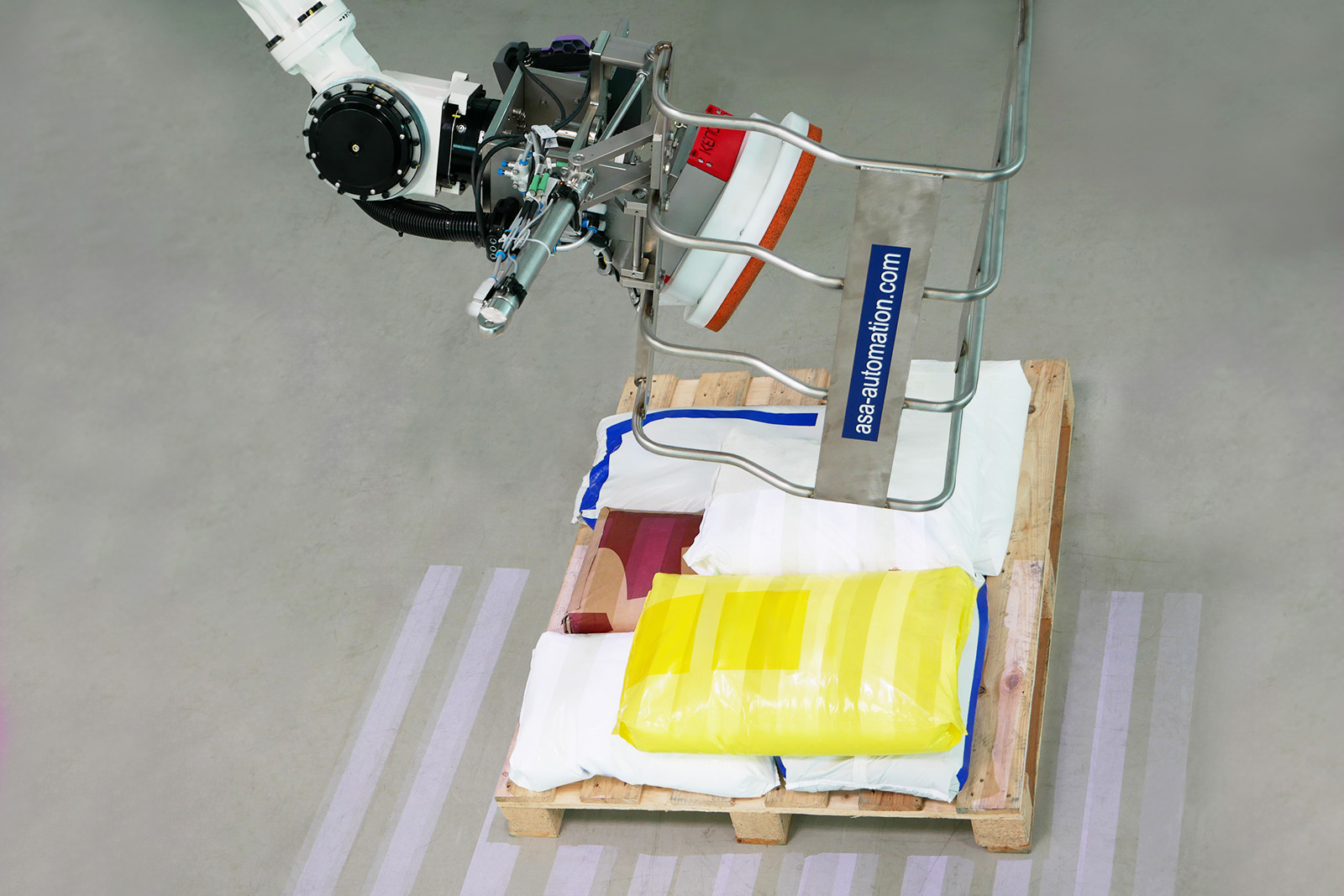
Wegen der geometrischen Varianz der Säcke, ihrer Positionen sowie der unterschiedlichen Materialien schieden klassische Bildverarbeitungsverfahren zur Erkennung der Objektpositionen als Lösungsmöglichkeit aus. Für die erforderliche exakte Bestimmung des Greifpunkts wurde daher die 3D-Picking-Lösung EyeT+ Flex eingesetzt, da es neben weiteren Werkzeugen auch die Möglichkeit abdeckt, Objekte mit Hilfe von künstlicher Intelligenz einzulernen.
Als Auge des Systems dient dabei eine am Roboterarm installierte Kamera, die zwei 3D-Scans der mit Säcken belegten Paletten durchführt. Grund dafür ist der geringe Abstand zwischen Kamera und den Objekten, der sich aus der geringen Raumhöhe und der relativ hohen Stapelhöhe ergab. Weitwinkelaufnahmen in nur einem Scan waren aufgrund der Verzerrung nicht machbar und auch der Einsatz eines Höhensensors kam nicht in Frage, weil damit die Gefahr bestand, die Objekthöhe fälschlicherweise an tieferliegenden Rändern der Säcke zu messen. Das hätte zu Kollisionen zwischen Greifer und den Säcken führen können. Mit zwei Aufnahmen der Kamera und der Zusammenfassung der Bilddaten über eine geeignete Software konnte jedoch auch diese Schwierigkeit gemeistet werden.